As you saw on the last page, you can create your own programs by dragging commands from the menu on the left, to the coding screen on the right.
You can then save your program by giving it a name.
We are now going to look at the commands in a bit more detail.
The main Command Groups that you are going to use are shown right. There are a few others but you do not need to use them at the moment.
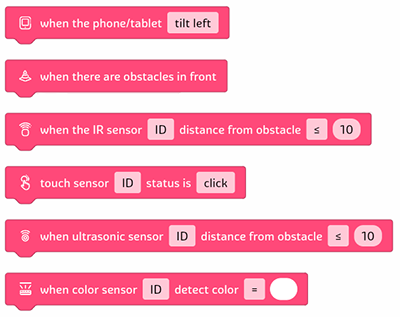
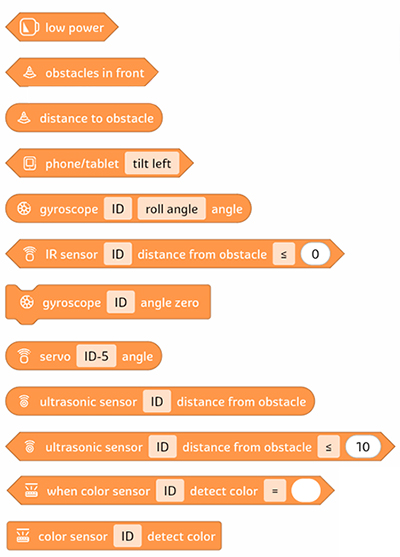
Events - Are actions that can happen e.g. an obstacle is placed in front of the Infra Red sensor (IR)
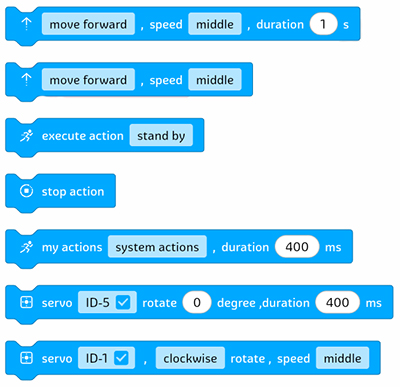
Moves - Are actions the Robot can perform e.g. Move Forward
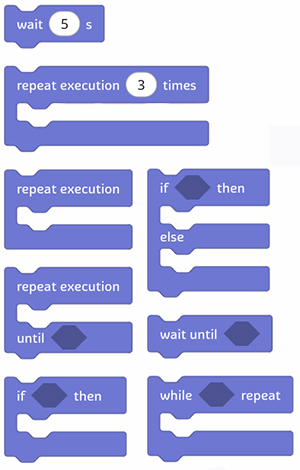
Control - Only lets the Robot perform an action after it has done something particular e.g. Waited 5 seconds
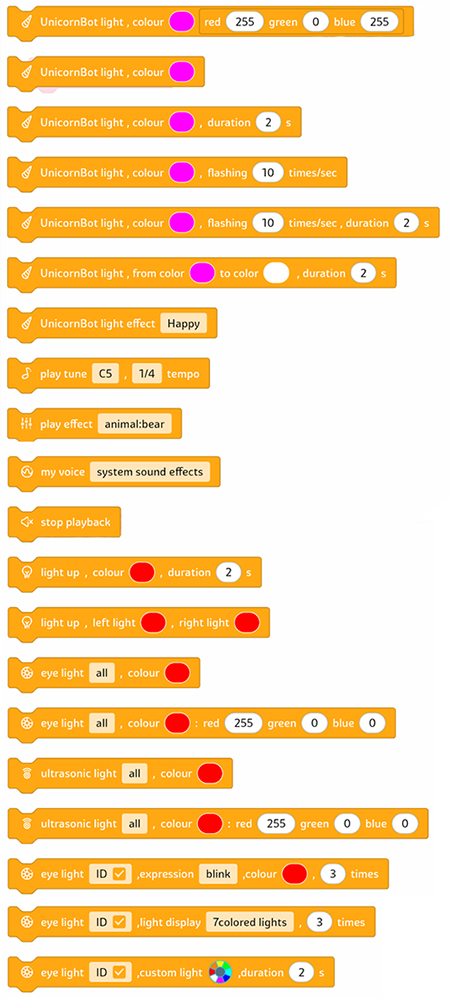
Show - Is the way the Robot can give feedback e.g. Light up the eyes or make a noise
Sensors - Are devices that can detect if something has changed. They are often used with Events. e.g. the IR sensor checking if an object is placed in front of it.
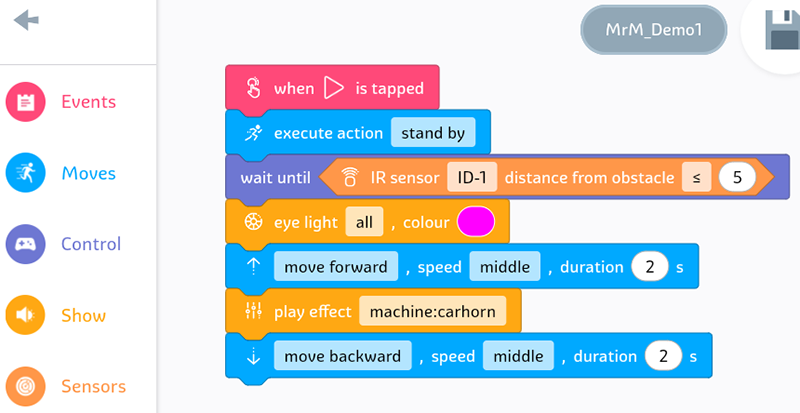
We will look at the commands in more detail lower down. But first we will look at an example piece of code. Can you work out which bits of the code are Events, Moves, Control, Show or Sensor commands? |