The resources below will help you. You are advised to use Loop / Repeat code.
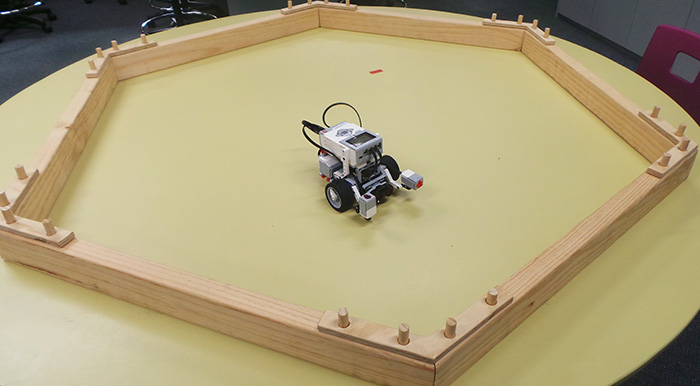
1) Move Forwards in a straight line.
2) Back up and then Rotate 180 degrees just before it collides with a Wall (use Motion Sensor - your Robot shouldn't actually touch the wall.)
3) Make some type of 'noise' and then start moving forwards again.
4) STOP when something RED is held above the Colour Sensor.