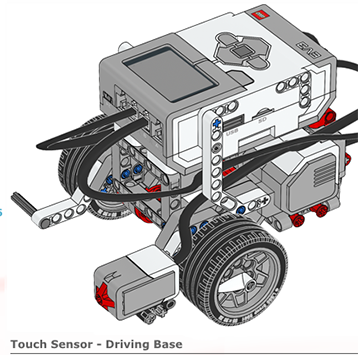
Add the Touch Sensor to your Robot.
Devise code that will make it move forward until it 'Collides' with an object. When the Touch Sensor makes contact with something the Robot should:
1) move back a short distance
2) turn around 180 degrees and then
3) move forward for 2 seconds and then stop. (it should follow same line it started on!)
4) Make a noise to indicate that it has stopped
You MUST demonstrate this to your Teacher.
|